Использование консервативных систем для исследования устойчивости нелинейных динамических систем
Консервативные системы - это такие системы, в которых количество сохраняется в том смысле, что она постоянна на любой траектории системы. Часто хранения количества имеет физический смысл такой, как суммарная энергия в случае систем, возникающих в классической механике. Допустим, мы имеем систему 
- E(x,y) постоянна на траектории системы, т.е. dE/dt = 0, откуда

- E(x,y) непостоянна вдоль траекторий, тогда E(x,y) сохраняет число и система является консервативной.
Нахождение постоянной характеристики системы
Найти постоянную характеристику E(x,y) сложно. Один из методов - нахождение первого интеграла системы.
Первые интегралы являются сохранившимися количествами в том случае, если они существуют для всех (x, y) на плоскости. Если первый интеграл не определен на всей плоскости, то система не является консервативной.
Пример. Найти первые интегралы для динамических систем 
- Разделим одно уравнение системы на другое

- Выполним аналогичную операцию, разделим одно уравнение системы на другое:

Очевидно, что эта функция не определена для х = 0. Таким образом, первый интеграл не определен на всей плоскости и система не является консервативной.
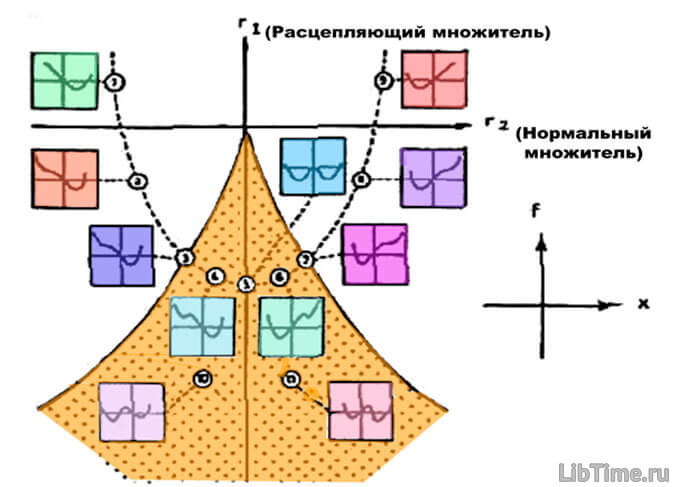
Устойчивость равновесия в консервативных системах
Если точка равновесия консервативной системы также удовлетворяет условию 

- оба положительны, то особая (стационарная) точка функции E(x,y) является локальным минимумом;
- Оба отрицательные, то особая (стационарная) точка функции E(x,y) является локальным максимумом;
- Такие, что одно значение положительное, а другое отрицательное, то особая (стационарная) точка является локальным седлом.
Если особая (стационарная) точка функции E(x,y) является локальным минимумом или максимумом, то кривые уровня E(x,y) замкнуты в окрестности точки равновесия.
Таким образом, развязки нелинейной системы также образуют замкнутые кривые вокруг точки равновесия, и точка равновесия является нелинейным центром и нейтрально устойчива. Это один из методов определения существования нелинейного центра.
Если точка равновесия является локальным седлом для E(x,y), то точка равновесия для нелинейной системы неустойчиво и является нелинейным седлом.