Маневрирования интенсивностями способов функционирования
Как правило, при постановке оптимизационных задач планирования указывается и некоторая область существования для величин интенсивностей способов. В одних случаях это просто требование положительности переменных - xj ≥ 0, в других устанавливается верхний предел переменных - 0 ≤ xj ≤ x'j
Наконец, довольно часто используются и двусторонние ограничения на переменные - bj ≤ xj ≤ x'j. Все эти ограничения устанавливают область возможного существования xj. Экономическое значение границ существования xj может быть самым разным (уже введена в прошлые периоды мощность, запасы полезного ископаемого, ограничения по строительству, экологические ограничения и т.д.).
Маневрирования может происходить только в области существования xj. Однако и в этом случае область возможного маневрирования, после того, как принято плановое решение о величине интенсивностей xj, в общем случае значительно уже за область существования xj. Это объясняется тем, что на принятое решение по xj осуществляется настройка и самой планируемой системы, и ее ближайшего окружения.
По мере настройки системы на выбранное конкретное значение xj дальнейшие изменения в той или иной степени ограничены. Принятие конкретных плановых решений по интенсивности способов xj осуществляет дополнительную структуризацию и в этой области. Со всей области первично возможных xj выделяется подобласть, расположенная в окрестности принятого значения xj, которая и определяет реальные маневренные возможности по изменению принятого xj.
Вывод: имеет место последействие принятия планового решения, характер которого и определяет маневренные и инерционные свойства выбранного варианта плана при изменении интенсивностей способов.
Пример маневрирования
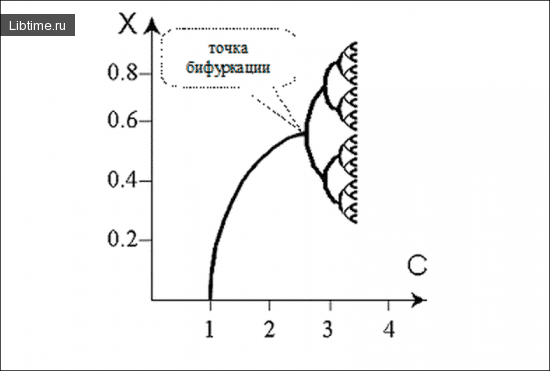
Пусть имеется некоторая совокупность возможных траекторий развития какого-либо выделенного j-гo способа (рис. 1). Все варианты динамики находятся в области существования 
На рисунке 2 видно, что при принятии решения о траектории развития во времени с использованием j-гo способа по 4-му варианту формируется коридор допустимого маневрирования в нештатных ситуациях, в общем случае тяжелее, чем область существования XJ, и что находится внутри последней.
Границы этого коридора определяют свою совокупность возможных нештатных траекторий развития, которые являются допустимыми. 

Практически нормирование пределов коридоров допустимого маневрирования в полудинамических задачах планирования можно осуществить следующим образом: 


Возможны различные варианты упрощения подхода, например путем линеаризации границ коридоров во времени 
Одно из важных положений данного подхода заключается в том, что при прочих равных условиях размеры коридоров маневрирования определяются свойствами системы и способов функционирования, а также принятыми штатными значениями интенсивностей.
Вывод: коридоры маневрирования выступают как некоторое отражение свойств экономической системы и способов функционирования и различные для разных систем и способов. Важнейшими факторами, определяющими эти свойства, является
- степень дискретности ввода мощностей,
- соотношение инфраструктурной и объектной частей затрат ресурсов и капиталовложений,
- соотношение частей затрат ресурсов, не зависящих от мощности и пропорциональных ей,
- соотношение расходных коэффициентов полных и прямых затрат,
- технико-технологические особенности системы и способа ее функционирования и т.д.