Выходные множества в планировании
Оптимизационные задачи планирования формируются на базе начального множества параметров и условий формирования плана.
Эти множества могут быть бесконечными или конечными. Их границы в значительной степени определяются состоянием объектов и ограничениями. 
Также к ним относятся такие множества, которые допускают изменения элементов, но эти изменения сводятся к дезагрегирования или агрегирования элементов исходного множества или к даче такой пассивной динамики элементов исходного множества, которая нейтральна по отношению к целевой функции и ограничений задачи.
Активными считаются следующие исходные множества, которые в зависимости от изменения ограничений или целей начинают (с присущими им маневренностью) менять свои границы и структуру так, что как только какой-либо начальной множества элементов приписаны некоторые внешние условия (ограничения, цели), оно обновится другим.
Положение двойственности доказаны для пассивных начальных множеств. Для активных множеств существует обратная связь между оценками, получаемыми в результате решения задачи на пассивной начальной множественном компонентами начального множества.
Динамику изменения границ начальной множества целесообразно отразить через влияние на них системы оценок. Такой подход будет наиболее адекватен, поскольку в реальной экономике система цен выполняет не только распределительные (по ресурсам), но и стимулирующие функции.
Под влиянием системы цен появляются новые технологии, технические способы, то есть в результате создается некая направлена активность. Направление этой активности будет определяться вектором оценок.
Что касается скоростных характеристик активности, т.е. например, темпов технического прогресса в тех или иных направлениях, то они зависят не только от вектора оценок, но и определяются маневренными свойствами в этой области (имеющийся научно-технический потенциал и ряд других обстоятельств).
Таким образом, через представление об активных начальные множества создается возможность формирования активного управления в оптимизационных задачах планирования, а система оценок начинает выполнять не только распределительную, но и стимулирующую роль.
Характер влияния оценок на начальное множество можно отображать на основе четырех различных подходов, в зависимости от меняющейся информации.
- Если динамичность начальной активной множества примечательное, т.е. нельзя указать ни направления, ни границ изменения множества, то формирование оценок чрезвычайно важно, но теоретически их невозможно определить, и остается только использовать методы проб и ошибок.
- Динамичность начальной множества может быть определена, но неопределенная: можно установить интервалы изменений, но законы распределения вероятностей таких изменений неизвестны.
- Динамичность начальной множества может быть описана как категория достоверности.
- Динамичность может быть описана детерминованоий, т.е. для фиксированной системы оценок можно предусмотреть все изменения, и эти изменения будут однозначными для каждого момента времени.
Переход от одного подхода к другому свидетельствует об изменении начальных концепций. Поэтому, если какие-либо выводы относительно оценок получены с применением одного подхода, то их формальное перенесение на другие подходы могут оказаться некорректным. При реализации данного подхода выделяются три этапа:
- изучение поведения плана как сложной системы при возможных изменениях начальной множества параметров и условий;
- определение основных направлений и областей существования новых путей развития системы,
- разработка методов и правил формирования планов на активных множествах,
Рассмотрим математическую модель формирования плана, записанную в виде прямой 


Анализ изменений множества и влияния этих изменений на решения оптимизационных задач удобно вести на множества однородных величин, однозначно выражаемых через начальные параметры

Величины qj - суммарные оценки заданного количества необходимой i-той продукции. Расходные коэффициенты aij (i является I1) характеризуют удельные выпуски i-той продукции на единицу затрат j-гo способа в долях величины Рi, а при (i является I2) - то же для i-го ресурса, потребляемого при j-м способе.
В этих переменных и параметрах прямая и двойственная задачи запишутся следующим образом: 
При традиционном подходе из возможных способов определяется набор оптимальных, а способы с нулевыми интенсивностями отбрасываются.
При формировании плана на активных множествах этого делать нельзя, так как в определенных условиях эти способы могут или вытеснить некоторые начальные оптимальные, или стать постоянными для реализации необходимых изменений в способах с высокой оценкой.
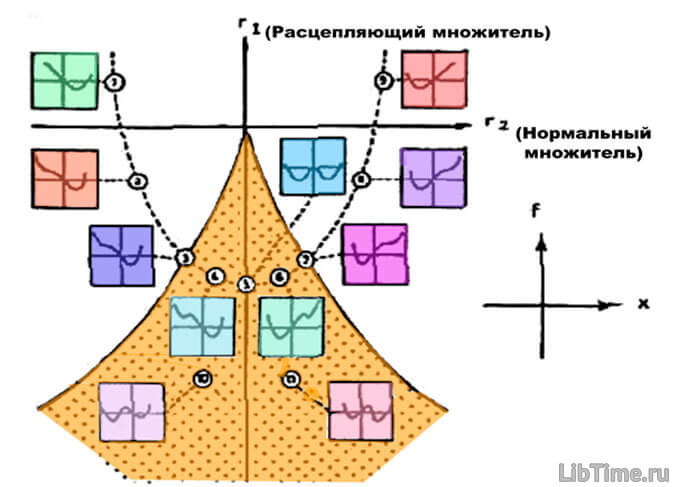
При заданных ограничениях в пространстве оценок qi существует область V начальных допустимых планов, ограниченная поверхностью L0 (рис. 1). 
В линейной постановке это выпуклый многогранник, ограниченный гиперплоскости 

Развитие плана на активных начальных множествах неизбежно должен привести к деформации границы области V, причем в определенной степени целенаправленной.
Так, стремление к росту эффективности производства за счет снижения издержек эквивалентно «давления» на область V в направлении нормали к гиперплоскости Q = sum(qi). В результате начальное множество коэффициентов aij испытывать определенные изменения.
Наличие внутренних связей и ограничений, накладываемых на возможные пределы этих изменений, приведет к определенным противодействий, обусловленных инерционными свойствами системы, а также к передаче деформации на другие участки границы L.
В результате для каждого заданного горизонта планирования существовать некая «зона активности», в рамках которой может изменяться граница области существования решений (см. рис. 1). Выявление указанной зоны и поведения плана как сложной системы в ее пределах требует изучения структурных свойств плана, и в частности изучению взаимодействия элементов активных множеств.