Оптимизационная задача планирования
Если поставить цель учитывать маневренные качества плана еще на этапе его формирования, то даже простая задача линейного программирования превращается в многокритериальную.
Для решения таких задач существует достаточно много методов. Следует, однако, сказать, что максимум маневренности плана в ущерб его оптимальности рассматриваться не будет.
Простая постановка задачи нахождения оптимального плана с учетом его маневренности по ресурсам может быть представлена так: 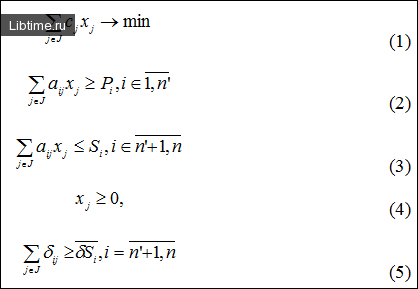

Постановка оптимизационной задачи планирования с учетом маневренных качеств плана
Такую постановку можно трактовать следующим образом.
- Выбирается произвольное множество J, что является допустимым с точки зрения условия (5).
- Для этого решается задача (2) - (4), и в результате находится значение функционала (1).
- Принято значение сравнивается со значением этого же функционала для другого допустимого множества J.
- Окончательным решением задачи является набор хj, что обеспечивает минимум функционала по всем допустимым подмножествам J.
Предельные маневренности могут быть связаны, в частности, с величинами интенсивностей хj. Если на каком-то участке этой зависимости допустить линейную связь маневренности, то 

Все рассмотренные выше постановки задачи по маневренности сводятся в итоге к набору таких объектов (способов и интенсивностей), которые при выполнении всех ресурсных и других ограничений образуют еще некоторый запас маневренности системы на случай возможного изменения условий выполнения плана.
Говорится, таким образом, о формировании маневренного набора объектов, включаемых в оптимальный план.
Свойства маневренного набора
Рассмотрим свойства этого маневренного набора. Предположим, что на интервале планирования [0, Т] сформирован оптимальный план, для которого 
Тогда для новых изменившихся условий, на часть периода планирования, что остался, можно составить новый вариант оптимального плана, который будем называть вторичным. Он описывается совокупностью вторичных соотношений, аналогичных (7): 
В этой ситуации, какие бы изменения условий ни происходили, множество J20 совпадает с множеством J10. Для такой системы маневренность базиса оптимального плана может быть определена как нулевая.
Например, абсолютно инерционной будет система планирования выпуска продукции, в которой заданы минимальные объемы выпуска по каждому виду продукции. Поэтому, какие бы изменения ни происходили, базис оптимального плана будет неизменным, если, конечно, оптимальный план вообще существует.
Другая крайняя ситуация заключается в том, что в какой-то момент времени t, принадлежащего интервалу планирования [0, Т], состоится мгновенная смена оптимального базиса начального плана, так что множество способов вторичного плана J20 ни в какой части не будет пересекаться с множеством J10 первоначального плана, т.е. в новом оптимальном плане базисными являются только небазисные переменные начального плана.
Система, допускающая подобные замены, будет абсолютно маневренной по базису.
Например, система, в которой участвуют всего два способа (продукта) и единственное ограничение по ресурсам, является абсолютно маневренной по базису, поскольку решение может находиться только в одной из двух точек и зависеть от угла между градиентом вектора цели и линией ограничения. 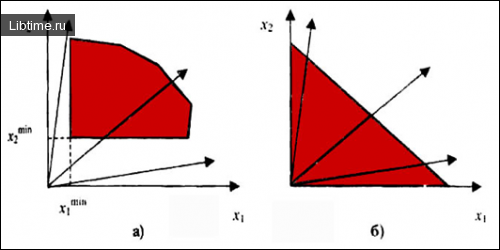
В общем случае при изменении условий функционирования плана может формироваться такое вторичное множество J20, которое в какой-то части будет пересекаться с начальным множеством J10. Степень пересечения будет характеризовать степень инерционности начального базиса оптимального плана в момент времени t на отрезке [0, Т].
Для определения этой степени необходимо ввести меру, согласованную с постановкой задачи и отражающую цели исследования плана.